Lab 8: Stunts (Redone)
Objective
Re-do the stunts shown in the original Lab 8
What went wrong before?
- The original Lab 8 stunt didn’t clear the white line, which means I needed to find a way to either get my timings tighter or use the sensors better.
- There was no open-loop stunt in my original Lab 8 page.
- The code was cluttered and difficult to make improvements upon.
Controlled Stunts: Take 2
The codebase I developed in labs 12 and onward felt much cleaner than my original implementation, so I used that instead of my original lab 8 code. It features a few new additions, such as the ability to drive for certain distances based on P-control and a ToF, as well as the ability to record data while driving forward in a simpler way.
Moving forward with P-control
Lab 12 taught me a better way to organize my code for P-controlled movement. Instead of making a messy main loop, I put all my PID code into a blocking function. It also pings the bluetooth device occasionally in order to avoid disconnecting; although that may have some small impacts on sensor reading frequency, it was better than having a robot only complete part of the maneuver before disconnecting.
You can view the full code on my GitHub repo.
void move_distance(int dist) {
int tof_dist = get_tof_measurement(distanceSensorTwo, 5); // average of 5 tries
int target = tof_dist - dist;
int motor_power;
int coast_power = 20;
while (true) {
tof_dist = get_tof_measurement(distanceSensorTwo, 1);
motor_power = pid_proportional_fwd * (tof_dist - target);
if (motor_power < -1*pid_min_power_fwd) {
move_backward(motor_power);
} else if (motor_power > -1*pid_min_power_fwd && motor_power < -1*coast_power) {
stop_motors(false);
} else if (motor_power > -1*coast_power && motor_power < coast_power) {
stop_motors(true);
return;
} else if (motor_power > coast_power && motor_power < pid_min_power_fwd) {
stop_motors(false);
} else if (motor_power > pid_min_power_fwd) {
move_forward(motor_power);
}
}
}
Time-Based Stunt
I had some initial difficulty with using P-control, but that largely came from inconsistencies in the robot’s power transmission itself; the robot would sometimes “stutter” and move forward a small amount and slow down before coming up to a normal speed. There were also times I had to re-tune the P-controller, leading to two implementations of stunt code.
My first implementation looked a lot like my old one in Lab 8, which was largely open-loop. I made an improvement by sending all stunt commands at once; that way, potential inconsistency with bluetooth latency would not affect the motion of the robot.
case DO_TIMED_STUNT:
...
// Move forward
move_forward_and_record(temp_move, temp_time);
Serial.println("Stop");
// Stop midway if asked
...
if (temp_move == 1) {
Serial.println("Sent stop");
stop_motors(true);
delay(100);
}
// move backwards
...
move_backward_and_record(temp_move, temp_time);
stop_motors(true);
break;
(some ellipses appear here for brevity, they contain code that gets any temporary variables)
Of course, this led me to have to devise a way to record PID information in a smarter way too. Instead of doing everything in the main Arduino loop, I used a loop and counter to avoid having to delay():
void move_forward_and_record(int base_power, int duration) {
unsigned long target = millis() + duration;
bool done = false;
int meas;
move_forward(base_power);
while (!done) {
meas = get_tof_measurement(distanceSensorTwo, true);
record_data(meas, base_power);
done = (millis() > target);
}
}
The results came out well; my robot could now cross the line more clearly.

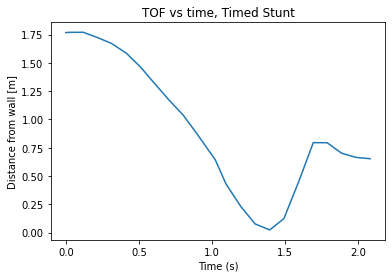
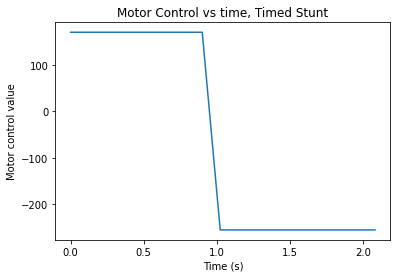
Other parameters:
- Forward motor power: 170
- Forward runtime: 900 ms
- Backward motor power: 255
- Backward runtime: 1000 ms
- Motor calibration factor: 1.3 (i.e. the left motor is 1.3x as fast as the right motor)
Sensor-Based Stunt
Now that I had gotten a better time-based stunt, I wanted to see if P-control could help me more. This caused me to write code for a sensor-based flip:
case DO_STUNT:
... // get temp vars from args
drive_until(temp_move);
move_backward_and_record(255, 1000);
stop_motors(true);
break;
The way I drive_until() looks much like driving forward a certain distance.
void drive_until(int tof_target) {
int tof_dist = get_tof_measurement(distanceSensorTwo, 5);
...
while (true) {
tof_dist = get_tof_measurement(distanceSensorTwo, 1);
motor_power = pid_proportional_fwd * (tof_dist - tof_target);
record_data(tof_dist, motor_power);
if (motor_power < -1*pid_min_power_fwd) {
move_backward(motor_power);
} else if (motor_power > -1*pid_min_power_fwd && motor_power < -1*coast_power) {
stop_motors(false);
} else if (motor_power > -1*coast_power && motor_power < coast_power) {
stop_motors(true);
return;
} else if (motor_power > coast_power && motor_power < pid_min_power_fwd) {
stop_motors(false);
} else if (motor_power > pid_min_power_fwd) {
move_forward(motor_power);
}
}
}
The results came out much better than my previous trials where I essentially abandoned my sensor in the original lab 8 page.

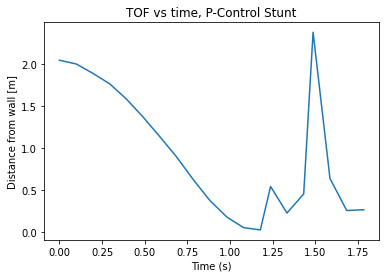
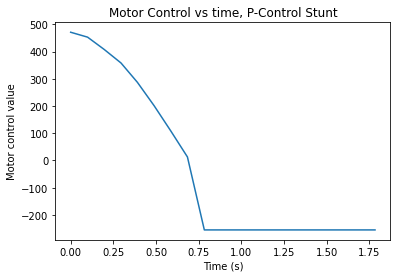
Other parameters:
- P-control constant: 0.4
- P-control min power: 35
- P-control setpoint: 870 mm
- Motor calibration factor: 1.3 (i.e. the left motor is 1.3x as fast as the right motor)
The large spike in the ToF graph comes from the noise from flipping and trying to see a distance that’s too far for the sensor to reach, as well as my hand moving in to grab the robot off the floor after the flip is over.
The P-control setpoint also seems higher than the video would suggest, but that largeness used to compensate for the slow frequency of the ToF sensor.
Open-Loop Stunts
I originally planned to try to get my robot to parallel park. After trying a few times and seeing some reliability issues with getting into a specific spot, I tried to increase reliability by removing the tape attached to the wheels that I used before when trying to get the robot to spin on its axis easier. That left a sticky residue on my wheels.
However, the glue remover I needed to remove the adhesive from the wheels had the unintended side effect of making the table and wheels slippery! That led to my open-loop stunt: The Parking Drift!

The controls I used for this are listed below:
bot.move_duration(100,500) # 100 power, 500 ms
bot.spin(80,-80,900) # 80 L, -80 R, 900 ms
bot.move_duration(100,1800)
bot.spin(100,80,500)
This also took a few tries to perfect, which brought rise to this bloopers video:
